Hello CVB team,
Hope you are doing well.
Since more than one year now, I use the stack 3 to take pictures on our main vision products. It use two AT (mostly C5 SCT) cameras that reconstruct huge carts to control components on it.
We set up the AT to take fixed size images with a maximum of profile (5400). We also open all Ethernet board parameters like Jumbo packets to there maximum. We set also the scsp packet size to it’s maximum.
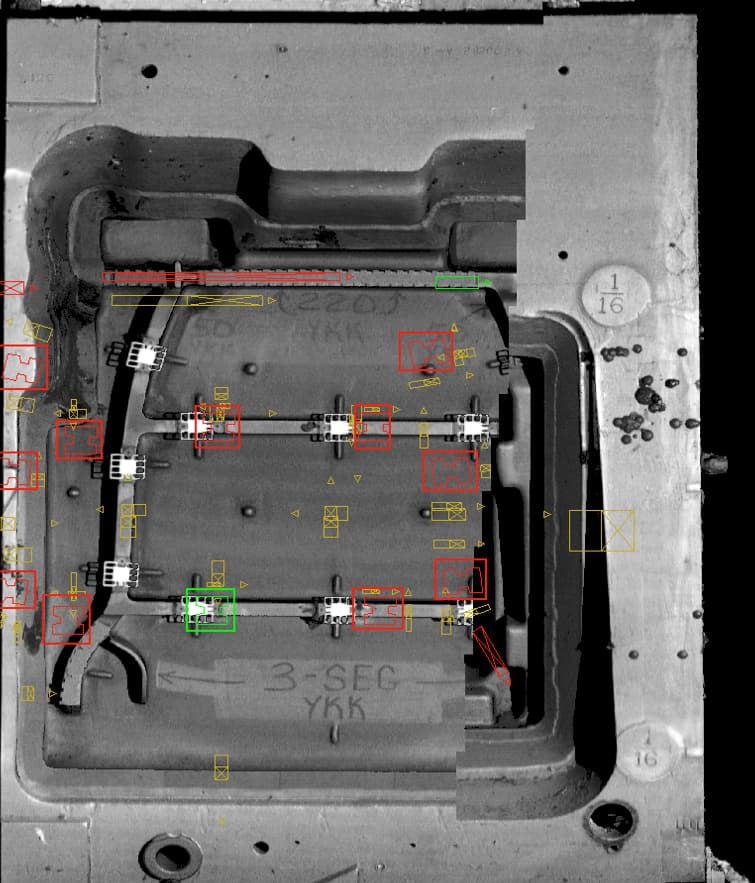
With the stack two, no problem at all. When we use stack 3 we can see this :
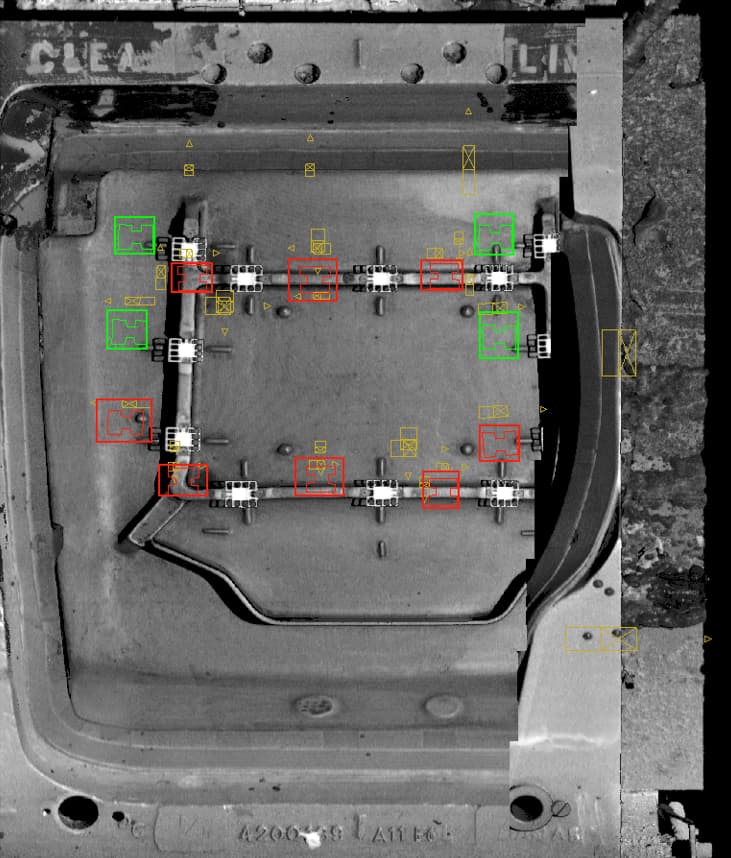
when we should have this :
We also understand that when this happen, we got verry small pikes (in red in the image) contrary to the huge pikes that we have normally (in green) with the task manager :

When we switched from stack 2 to stack 3 or the inverse, no parameters are changed.
The stack 3 used a composite image to get data. Both camera are on the same Ethernet board, without any other element on it.
We suspect that either we get a improper network settings or a problem with stack 3 like bad uses or missing a parameters that need to set up ? Or have you any ideas ?